
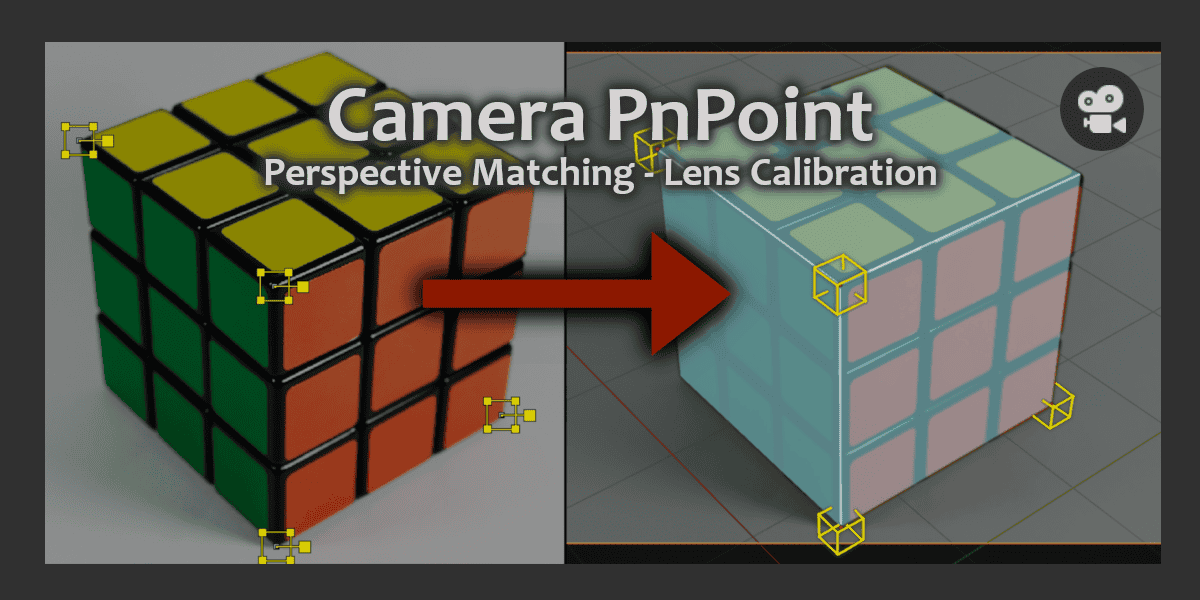
Camera PnPoint 是 Blender 的附加组件,它为摄像机跟踪工作台带来了强大的 Perspective-n-Point 求解器。PnP是问题 从一组给定的 3D 中估计校准相机的姿势 点及其在图像平面中的 2D 投影。
该插件还包括一个相机校准求解器,允许 调整最相关的镜头参数,如焦距和 径向畸变,使用 3D 和 2D 投影数据 标记。
PnP算法与其他视角的主要区别 匹配工具是它不需要带有多个图片的图片 消失点,或具有平行线的对象。在 此外,与内置的相机运动求解器不同,该插件依赖于 地面真实 3D 位置,只需要一张静止图片即可找到 相机姿势。
此插件使用 OpenCV 库,可以从附加组件的首选项面板安装。您可能需要 以提升的权限启动Blender,使其正常工作。
特征
- 使用 PnP 算法的搅拌机的相机姿态求解器。
- 用于搅拌机的相机镜头校准求解器。它可以优化焦距、主点和径向畸变参数。
- 为方便用户,将显示最后一个求解的重投影误差。
- 姿势求解器会自动使用生成的外在、内在和背景图像设置相机。
资源下载
下载价格免费
©版权声明:本站除原创作品外的资源均收集于网络,只做学习和交流使用,版权归原作者所有,若作商业用途,请购买正版。



评论0