
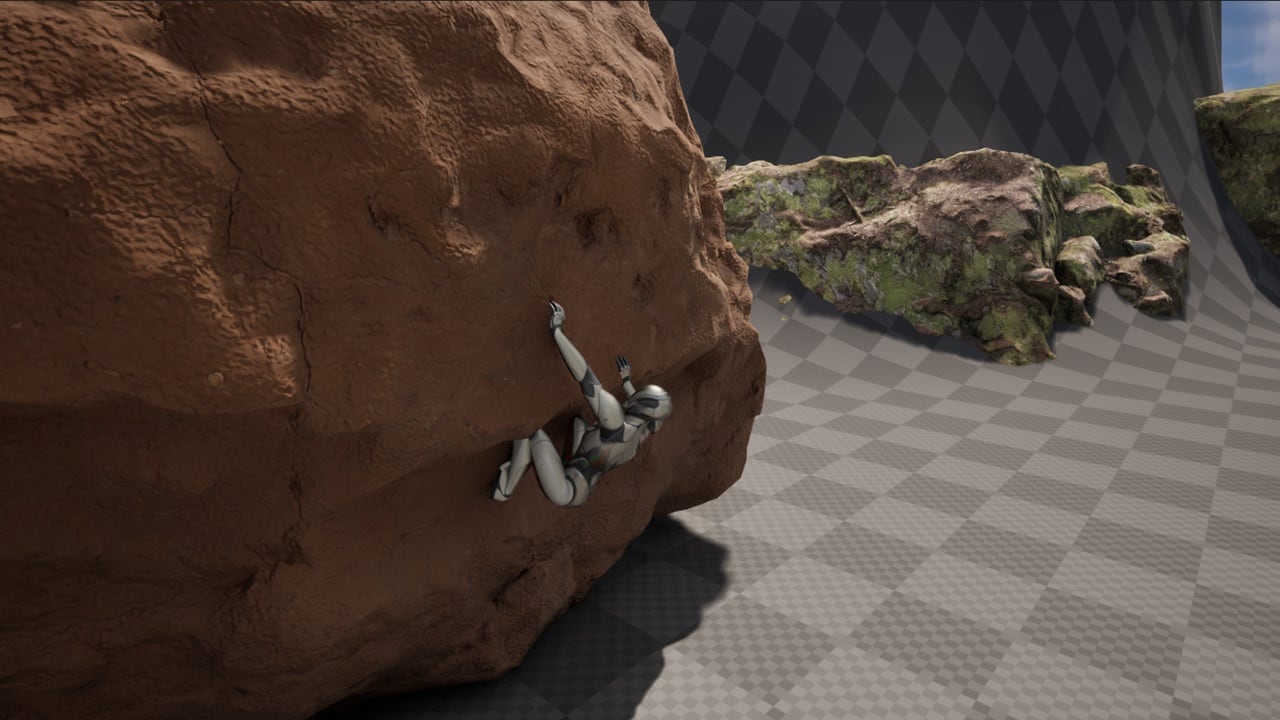
本资源利用控制 Rig 逻辑实现了逼真且自然的攀爬动作,无需预设动画。通过全身 IK 的强大功能,控制 Rig 自动计算全身各部位的正确位置,从而生成高质量的攀爬效果。这套蓝图系统特别适合快速关卡设计,其逻辑能适应自然环境,尤其适用于圆滑边缘或钝角区域;但在尖刺、孔洞、深裂缝或超过 100 度的锐角地形上可能会出现异常效果。
主要特点
-
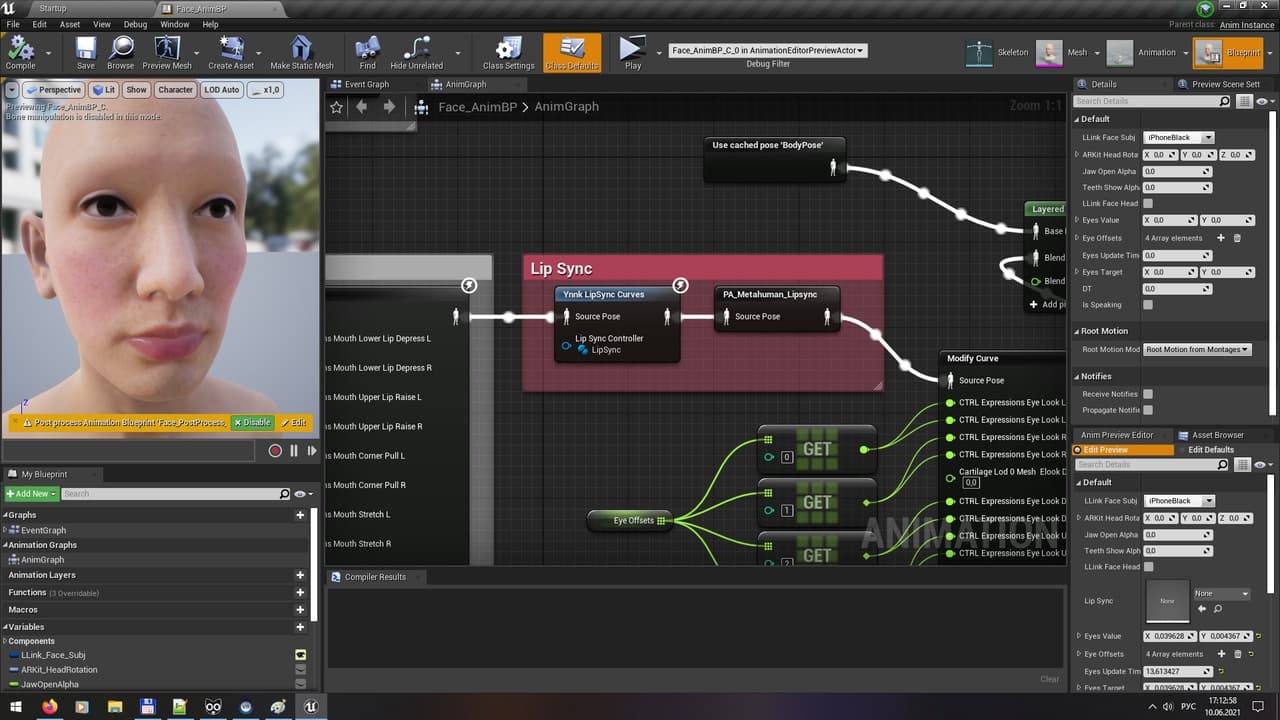
完全基于蓝图
- 无需 C++ 编程,所有功能均由蓝图实现
- 内置详细注释,便于学习和自定义扩展
-
全身 IK 攀爬逻辑
- 控制 Rig 利用全身 IK 自动定位,实现无动画预设下的自然攀爬
-
预设蓝图组件
- 包含角色蓝图,用于世界中角色的运动控制
- 包含动画蓝图,基于 Unreal Engine 默认第三人称角色变量进行构建
- 包含完整的控制 Rig 模块
-
适用快速关卡设计
- 灵活适应自然环境,极大提升设计效率
- 最佳效果适用于圆滑边缘或钝角;在不规则地形上效果可能不佳
资源下载
下载价格免费
©版权声明:本站除原创作品外的资源均收集于网络,只做学习和交流使用,版权归原作者所有,若作商业用途,请购买正版。




评论0